車体の傾きを検出して、障害物に乗り上げて後傾になってしまったときは、いったん後退するというものです。
後退は2つある障害物センサー(光反射センサー)が両方ともONとなったときにも、いったん後退するとしてあります。
2つの場合とも後退するので、どちらの理由で後退をしたのかが判りづらいのです。
やっぱり確認ランプをつけるか。
3つのセンサー動作中のLEDを付けることにしました。
コントローラのPIC 16F88は幸いにまだIOが残っています。
駆動用の電池は3.6Vのリチウムイオン電池です。
モータ駆動用のICの東芝のTA7291Pはコントロール系は4.5Vが必要なので、その部分とPICの電源はステップアップDCDCコンバータをつかっています。
LEDをそのDCDCコンバータ電源を使うとDCDCコンバータの許容電流を越えてしまいそうです。
PIC側でシンク(吸い込み)駆動として、LED電源はリチウムイオン電池から直接とることにしました。
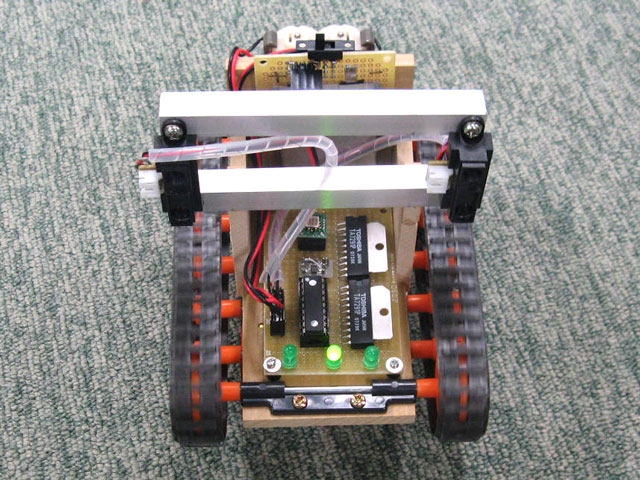
前から見て、右から加速度センサー、左障害物センサー、右障害物センサーです。