千葉市科学館で1月2日、3日と「トコトコ馬」の工作をしています。今年は午年ですね。
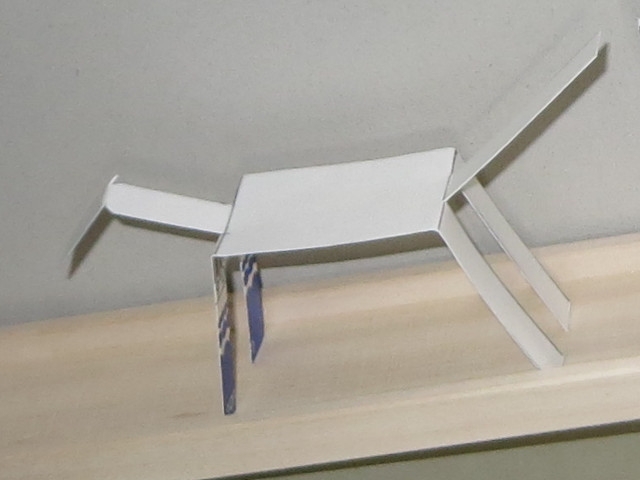
トコトコ馬は3cm×15cmの工作用紙(写真は牛乳パックで作っています)を切って折り曲げて馬の形にしたものを、坂道をトコトコ歩かせるというものです。
これは青森の野呂さんが水野さんの本を参考に完成されたようです。トコトコ馬の命名は「ひねもす遊び」の岡田さんだそうです。
工作ははさみで切って折り曲げるだけですから、比較的簡単ですが、トコトコと上手く歩かせるのはなかなか大変です。
まず、どっしりした安定した形だと動きません。坂を急にすると滑って降りてしまいます。
歩かせるにはある程度不安定でないと歩きません。
背中を進行方向と直角方向に曲げると足が広がります。広がると足の内側が1点で斜面に当たります。そうすると左右に振れやすくなります。重心が左右に振れると片側の足が浮きます。浮いた側の足は前にでて、浮かない足は摩擦でその位置にいます。逆に振れると逆の足が前にでてもう一方は摩擦でとどまります。これを繰り返して歩くわけです。(人が歩くときも重心が左右に振れていますね。2足歩行ロボットでもそうしているようです)
重心が左右に動くように不安定な動作をさせるには、重心を高く(しっぽや頭を高くする、背中に重りをつける)足先の形(左右に振れやすいよう外側を切る)、足の肩部分の柔らかさなどの要因があるようです。
また、歩くにも早足歩き(足に重りをつける)、真っ直ぐに歩くには、など工夫することが満載の工作です。