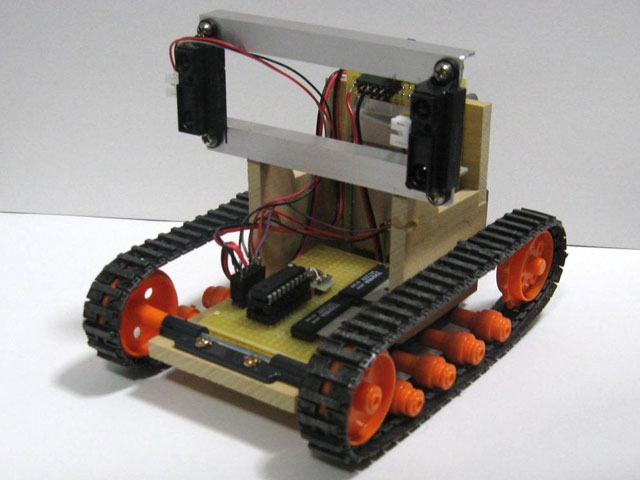
本体はタミヤのショベルドーザーというキャタピラー駆動のショベルカーの本体部分のみを使いました。
左右の駆動モーターコントロールは12月3日の「DCモータのコントロール基板」です。
電源はリチウムイオン二次電池で11月29,30日の「リチウムイオン二次電池」です。
自走式にするには、センサーで障害物を検出しなければなりません。
センサーにはシャープの光反射型のGP2D12を使いました。千石電商で1つ750円です。これを右と左につけます。障害物があると、その距離によってアナログ電圧が変わります。20cmで1.3V程度のようです。
この左右のセンサーからの信号で次のようなアルゴリズムで動くようにしてみました。
左、右ともにOFF(障害物がない)のとき。。。前進
左に障害物があるとき。。。。。。。。。。。。。。右ターン
右に障害物があるとき。。。。。。。。。。。。。。左ターン
左、右ともにON(障害物がある)のとき。。。。後退
まあ!なんと単純な!!アルゴリズムですね。
マイコンはPICの16F88です。センサーからのアナログ信号をADコンバートして、上記判定をします。
前進性能がいまいちでまっすぐに走りません(早い側のモーターを遅くする調整を必要とします)。スピードもあまりありません(モーター、ギヤの減速比を変える?)。が、一応、障害物を避けて自走します。
残念ながら、今年の火星ローバーコンテストに間に合いません。(12月1日が本番でした)
また、小中学生が操縦者という規定にも当てはまらないので、出場はできません。
せめて、来年の試走会のとき、規定の技術コースを走らせてみましょうか。