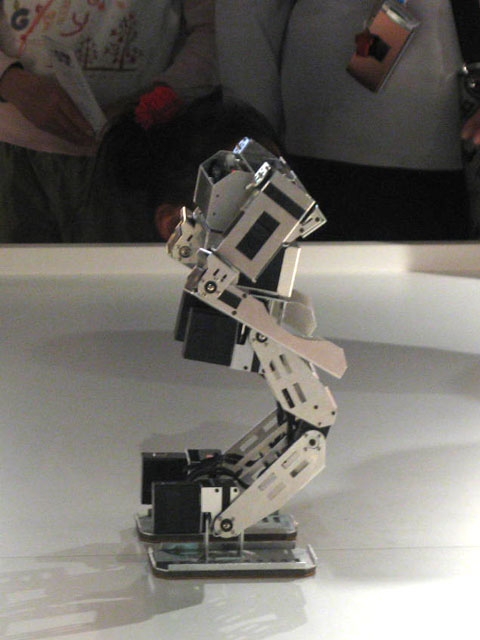
大学のサークルで製作された2足歩行ロボットのショーです。
動かすにはどういう原理で動いているだとか、どういう命令を出すだとか、どうやって作っただとかの説明をしたあとで、。。。。
やっぱり、4体のロボットによるバトル!!をトーナメントで行い優勝ロボットを決めるというものです。
操縦者が一人足らず、そのピンチヒッター?として手伝うことになりました。
正直、あまりラジコンの操縦などはやったことがありません。
左右のスティックを使って操縦します。
1スティックの操作でモーション(動き)が連続的につけられています。がまだまだ複雑です。
15分ほど、試しに操縦してみました。とりあえずはなんとか動かすことができるようになりました。
本番では。。。。。。やはり、なかなか思い通りには動かせません。残念ながら?敗退です。バトルは好きではないのですが、興奮もしますね。
2足歩行ロボットを自分でも作って練習してみるかなぁ。。。。。。。
自分の腕の未熟さを棚に上げて、スティックに配置されるモーションが、適切か?との疑問もあります。
左のスティックを前で前進、後ろで後退、右で右に、左で左に動きます。右のスティックを右で右旋回、左で左旋回、前で左スティックを右で右パンチ左で左パンチ、後ろで左スティックを右で仰向けからの起き上がり、左でうつぶせからの起き上がり
となっています。
旋回とパンチを逆にしたほうが使う頻度と判りやすさからいいように思いました。
10の動作を8つのスティック動作で処理するのですから、どうしても同じようなスティックの動きで違った動作をさせることになり、操縦者を悩ませます。
人の技量によるのか、ハードを増やすのか、フールプルーフ設計の見せ所のようですね。(負け惜しみ!!)