1号機(自走式)は20度の山が登れません。
加速度センサーで姿勢をみて、ひっくり返りそうなら後退するとした制御が裏目に出ています。
もっと急でないと、後退しないようにすればいいのですが、そうすると、コースの外に外れそうなときを検出できないかもしれないのです。
火星ローバーコンテストの技術コースはコース外の境目が高さ5cm程度の壁で、この1号機の光を使った障害物センサーでは検知できませんでした。そこで、コース外に落ちないために、壁に乗り上げたことを加速度センサーで検出し後退するとしてあります。(障害物センサーの両方が検出できない狭い障害物に乗り上げたときに後退するという役目もあります)
そこで、壁に接触したことを直接的に検出することにしました。
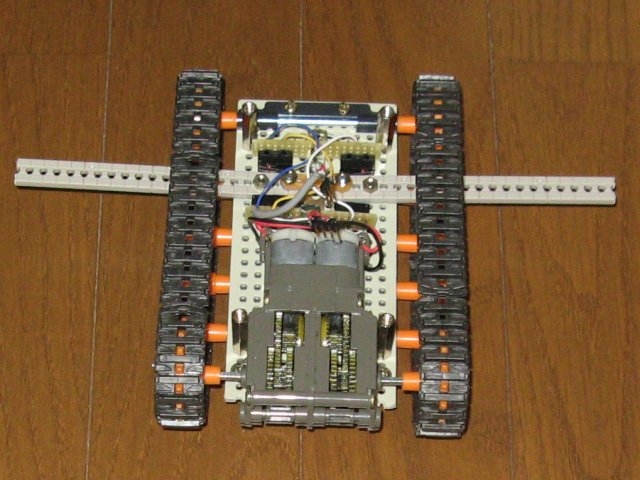
両側に伸びているのが壁検出の「腕」です。腕が壁に接触するとスイッチを押すことにします。
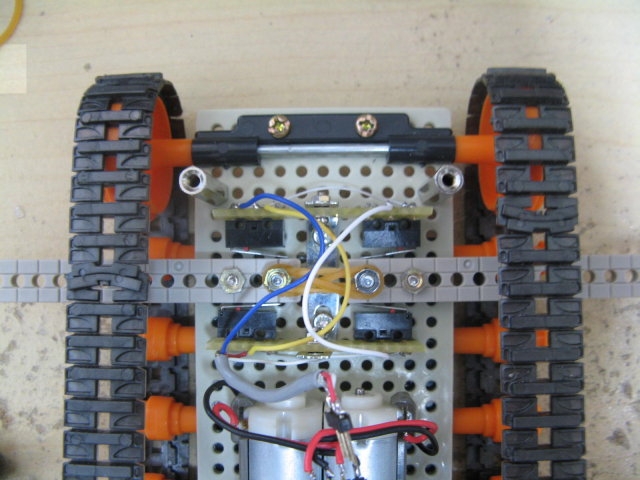
腕は両側に独立で設けました。4つあるマイクロスイッチがリミットスイッチになっています。腕が前に動いても、後ろに動いてもスイッチを押して検出します。(スイッチは前後2つが並列になっています)
加速度センサーはセンサー出力をボリュームで可変として、再度の試走会で最適値に調整できるようにしておきます。
追加のスイッチを設けたので、もとの木のフレームは使えず、ユニバーサルボードでフレームをつくりました、下がモーターとスイッチ、上が障害物センサーと基板、電池との2階建てになっています。