
ものすごいスピードでワークを運んでいるロボットや正確に位置決めのできる目をもった組み立てロボットなど産業用のロボットでいっぱいでした。
ただほとんどはワークの形状が一定しているものを扱うもので、ワークをつかむチャッキング部分は単純そうです。
実は「火星ローバーコンテスト」のサンプル採取のためのサンプル取り込み機構の参考になるアイディアを探しにいったのです。
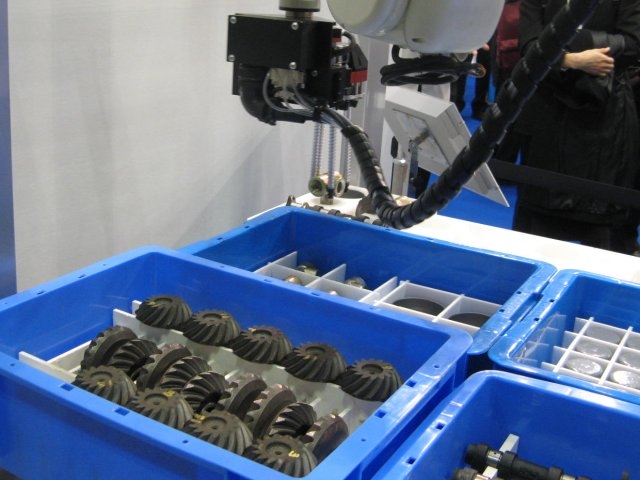
上の写真は4種類のワークを運ぶもので、4本のギザギザのついた棒でワークを挟むようになっています。
これなら形状が違う3種のサンプルを扱うことができるかもしれません。が作るのは難しそうです。
残念ながらあまり参考にはなりませんでした。

なかなか優美な「段ボール」で作られたロボット嬢です。両腕と頭がサーボモータで動くようになっています。
ちょっと作ってみたい気になりました。